Сборку закончил.
По сравнению с начальным вариантом есть несколько изменений:
- добавил Z Rod Constraint для жесткости резьбовых шпилек: http://www.thingiverse.com/thing:9864
- ось Y сделал на 3-х подшипниках в место 4-х
- поставил крепление для подшипника ремня Y, теперь только один подшипник необходим и можно опустить стол, тем самым увеличить рабочее перемещение по Z: http://www.thingiverse.com/thing:12148
Датчики положения:
- для осей X Y использую обычные микрики
- для оси Z использую оптический датчик от электрики GEN3
не нравится мне микрик на оси Z, вроде как есть люфт, а из-за этого нулевая высота меняется
- сделал регулируемое крепление флажка датчика Z
Электрика:
Не причесана еще :)
- материнка и экструдер: GEN3
- драйвера шаговиков: готовые брал в электроприводе. Так как использую шкивы с 10 зубьями, то
решил использовать их, так как есть деление шага (сейчас 1/8)
- стол с нагревом от старого принтера (самодельный), скоро должен быть нормальный для Prusa.






По сравнению с начальным вариантом есть несколько изменений:
- добавил Z Rod Constraint для жесткости резьбовых шпилек: http://www.thingiverse.com/thing:9864
- ось Y сделал на 3-х подшипниках в место 4-х
- поставил крепление для подшипника ремня Y, теперь только один подшипник необходим и можно опустить стол, тем самым увеличить рабочее перемещение по Z: http://www.thingiverse.com/thing:12148
Датчики положения:
- для осей X Y использую обычные микрики
- для оси Z использую оптический датчик от электрики GEN3
не нравится мне микрик на оси Z, вроде как есть люфт, а из-за этого нулевая высота меняется
- сделал регулируемое крепление флажка датчика Z
Электрика:
Не причесана еще :)
- материнка и экструдер: GEN3
- драйвера шаговиков: готовые брал в электроприводе. Так как использую шкивы с 10 зубьями, то
решил использовать их, так как есть деление шага (сейчас 1/8)
- стол с нагревом от старого принтера (самодельный), скоро должен быть нормальный для Prusa.

Общий вид

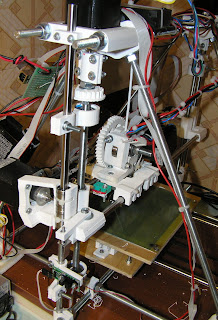
Ось Z и крепление флага датчика

Ось Z

Электрика

Новое крепление ремня оси Y
Качество печати заметно улучшилось. Правда не только благодаря механике, но и софту.

